pyyeti.ode.SolveExp1¶
- class pyyeti.ode.SolveExp1(A, h, order=1)[source]¶
1st order ODE time domain solver based on the matrix exponential.
This class is for solving:
yd - A y = fThis solver is exact assuming either piece-wise linear or piece-wise constant forces. See
SolveExp2for more details on how this algorithm solves the ODE.Examples
Calculate impulse response of state-space system:
xd = A @ x + B @ u y = C @ x + D @ u
- where:
force = 0’s
velocity(0) = B
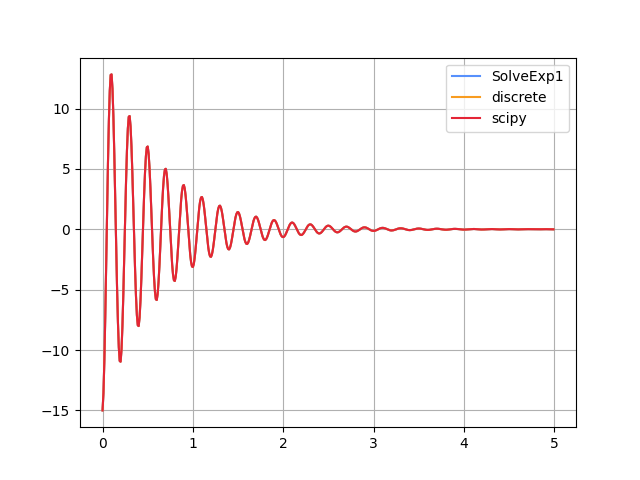
>>> from pyyeti import ode >>> from pyyeti.ssmodel import SSModel >>> import numpy as np >>> import matplotlib.pyplot as plt >>> f = 5 # 5 hz oscillator >>> w = 2*np.pi*f >>> w2 = w*w >>> zeta = .05 >>> h = .01 >>> nt = 500 >>> A = np.array([[0, 1], [-w2, -2*w*zeta]]) >>> B = np.array([[0], [3]]) >>> C = np.array([[8, -5]]) >>> D = np.array([[0]]) >>> F = np.zeros((1, nt), float) >>> ts = ode.SolveExp1(A, h) >>> sol = ts.tsolve(B @ F, B[:, 0]) >>> y = C @ sol.d >>> fig = plt.figure('Example') >>> fig.clf() >>> ax = plt.plot(sol.t, y.T, ... label='SolveExp1') >>> ssmodel = SSModel(A, B, C, D) >>> z = ssmodel.c2d(h=h, method='zoh') >>> x = np.zeros((A.shape[1], nt+1), float) >>> y2 = np.zeros((C.shape[0], nt), float) >>> x[:, 0:1] = B >>> for k in range(nt): ... x[:, k+1] = z.A @ x[:, k] + z.B @ F[:, k] ... y2[:, k] = z.C @ x[:, k] + z.D @ F[:, k] >>> ax = plt.plot(sol.t, y2.T, label='discrete') >>> leg = plt.legend(loc='best') >>> np.allclose(y, y2) True
Compare against scipy:
>>> from scipy import signal >>> ss = ssmodel.getlti() >>> tout, yout = ss.impulse(T=sol.t) >>> ax = plt.plot(tout, yout, label='scipy') >>> leg = plt.legend(loc='best') >>> np.allclose(yout, y.ravel()) True
- __init__(A, h, order=1)[source]¶
Instantiates a
SolveExp1solver.- Parameters:
A (2d ndarray) – The state-space matrix:
yd - A y = fh (scalar or None) – Time step or None; if None, the E, P, Q members will not be computed.
order (scalar, optional) – Specify which solver to use:
0 for the zero order hold (force stays constant across time step)
1 for the 1st order hold (force can vary linearly across time step)
Notes
The class instance is populated with the following members:
Member
Description
A
the input A
h
time step
n
number of total DOF (
A.shape[0])order
order of solver (0 or 1; see above)
E, P, Q
output of
pyyeti.expmint.getEPQ(); they are matrices used to solve the ODEpc
True if E, P, and Q member have been calculated; False otherwise
The E, P, and Q entries are used to solve the ODE:
for j in range(1, nt): d[:, j] = E*d[:, j-1] + P*F[:, j-1] + Q*F[:, j]
Methods
__init__(A, h[, order])Instantiates a
SolveExp1solver.tsolve(force[, d0])Solve time-domain 1st order ODE equations.