pyyeti.ode.FreqDirect¶
- class pyyeti.ode.FreqDirect(m, b, k, rb=None, rf=None)[source]¶
2nd order ODE frequency domain solver
This class is for solving:
m xdd + b xd + k x = f
Notes
Each frequency is solved via complex matrix inversion. There is no partitioning for rigid-body modes or residual- flexibility modes. Note that the solution will be fast if all matrices are diagonal.
Unlike
SolveUnc, this routine makes no special provisions for rigid-body modes when computing the response; therefore, including 0.0 in freq can cause a divide-by-zero. It is therefore recommended to ensure that all values in freq > 0.0, at least when rigid-body modes are present. After the solution is computed, for equations that are in modal space, the rigid-body part of the response may be zeroed out according to the incrb parameter infsolve().See also
Examples
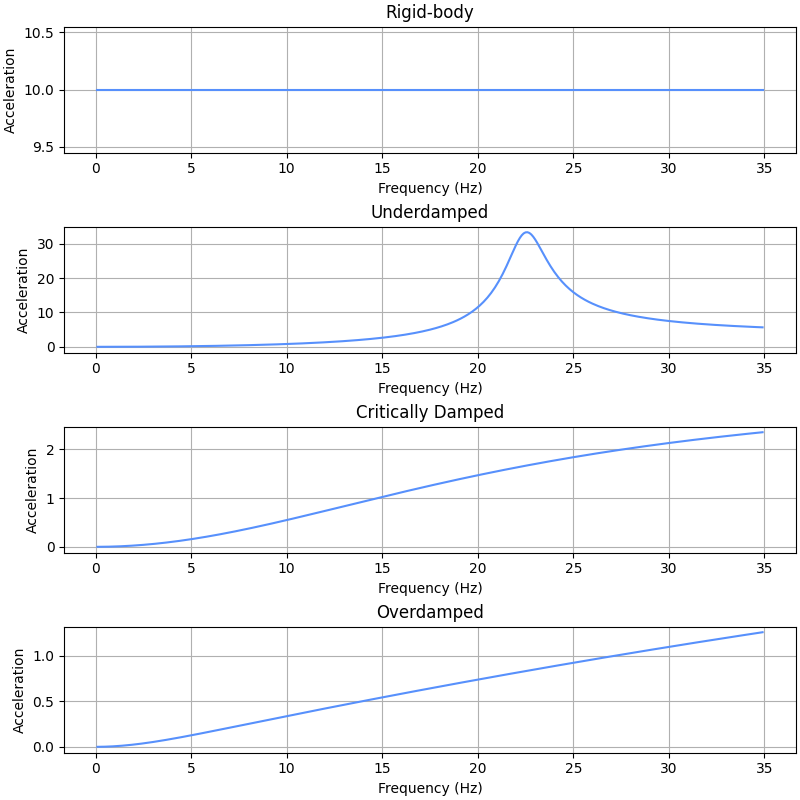
>>> from pyyeti import ode >>> import numpy as np >>> m = np.array([10., 30., 30., 30.]) # diag mass >>> k = np.array([0., 6.e5, 6.e5, 6.e5]) # diag stiffness >>> zeta = np.array([0., .05, 1., 2.]) # % damping >>> b = 2.*zeta*np.sqrt(k/m)*m # diag damping >>> freq = np.arange(.1, 35, .1) # frequency >>> f = 100*np.ones((4, freq.size)) # constant ffn >>> ts = ode.FreqDirect(m, b, k) >>> sol = ts.fsolve(f, freq)
Solve @ 25 Hz by hand for comparison:
>>> w = 2*np.pi*25 >>> i = np.argmin(abs(freq-25)) >>> H = -w**2*m + 1j*w*b + k >>> disp = f[:, i] / H >>> velo = 1j*w*disp >>> acce = -w**2*disp >>> np.allclose(disp, sol.d[:, i]) True >>> np.allclose(velo, sol.v[:, i]) True >>> np.allclose(acce, sol.a[:, i]) True
Plot the four accelerations:
>>> import matplotlib.pyplot as plt >>> fig = plt.figure('Example', figsize=[8, 8], clear=True, ... layout='constrained') >>> labels = ['Rigid-body', 'Underdamped', ... 'Critically Damped', 'Overdamped'] >>> for j, name in zip(range(4), labels): ... _ = plt.subplot(4, 1, j+1) ... _ = plt.plot(freq, abs(sol.a[j])) ... _ = plt.title(name) ... _ = plt.ylabel('Acceleration') ... _ = plt.xlabel('Frequency (Hz)')
- __init__(m, b, k, rb=None, rf=None)[source]¶
Instantiates a
FreqDirectsolver.- Parameters:
m (1d or 2d ndarray or None) – Mass; vector (of diagonal), or full; if None, mass is assumed identity
b (1d or 2d ndarray) – Damping; vector (of diagonal), or full
k (1d or 2d ndarray) – Stiffness; vector (of diagonal), or full
rb (1d array or None; optional) – An option for equations in modal space. Index or bool partition vector for rigid-body modes. Set to [] to specify no rigid-body modes. If None, the rigid-body modes will be automatically detected by this logic for uncoupled systems:
rb = np.nonzero(abs(k).max(0) < 0.005)[0]
And by this logic for coupled systems:
rb = ((abs(k).max(axis=0) < 0.005) & (abs(k).max(axis=1) < 0.005) & (abs(b).max(axis=0) < 0.005) & (abs(b).max(axis=1) < 0.005)).nonzero()[0]
rf (1d array or None; optional) – Index or bool partition vector for residual-flexibility modes; these will be solved statically. As for the rb option, the rf option only applies to modal space equations.
Notes
The instance is populated with some or all of the following members.
Member
Description
m
mass
b
damping
k
stiffness
h
time step (None)
rb
index vector or slice for the rb modes
el
index vector or slice for the el modes
rf
index vector or slice for the rf modes ([])
_rb
index vector or slice for the rb modes relative to the non-rf modes
_el
index vector or slice for the el modes relative to the non-rf modes
nonrf
index vector or slice for the non-rf modes
kdof
index vector or slice for the non-rf modes
n
number of total DOF
rfsize
number of rf modes
nonrfsz
number of non-rf modes
ksize
number of non-rf modes
krf
stiffness for the rf modes
ikrf
inverse of stiffness for the rf modes
unc
True if there are no off-diagonal terms in any matrix; False otherwise
systype
float or complex; determined by m, b, and k
The mass, damping and stiffness may be real or complex. This routine currently does not accept the rf input (if there are any, they are treated like all other elastic modes).
Methods
__init__(m, b, k[, rb, rf])Instantiates a
FreqDirectsolver.finalize([get_force])Finalize time-domain generator solution.
fsolve(force, freq[, incrb, rf_disp_only])Solve equations of motion in frequency domain.
generator()'Abstract' method to get Python "generator" version of the ODE solver.
get_f2x()'Abstract' method to get the force to displacement transform used in Henkel-Mar simulations.
tsolve()'Abstract' method to solve time-domain equations