pyyeti.ode.SolveNewmark.def_nonlin¶
- SolveNewmark.def_nonlin(dct)[source]¶
Define nonlinear force terms
- Parameters:
dct (dictionary) – Dictionary where each entry defines a nonlinear force term. You can define any number of terms. Each value is a sequence of 2 or 3 items: a function (or other callable), a 2d ndarray, and optionally a dictionary of arguments for the function. The dictionary keys are arbitrary but will be used as keys in the z return value in the output of
tsolve(). The form of the dictionary is:{ key_0: (func_0, T_0 [, optargs_0]), key_1: (func_1, T_1 [, optargs_1]), ... }
Item
Description
func_i
Each function must accept at least 3 arguments: the current solution displacement matrix (d), the current step index (j), and the time step (h). It can accept other arguments which are specified via optargs:
def func_i(d, j, h [, ...]):
The function must return a 1d ndarray. It will be multiplied by the corresponding transform T and added to the other force terms (this is the \(N_{n+1}\) term shown in
SolveNewmark). See note below if velocity dependent terms are needed.T_i
Each T_i matrix transforms the corresponding function output to a force. If your function outputs the final force already, just use identity for this transform. The reason this input is here, instead of relying on the user-supplied function func_i to apply the transform internally, is for efficiency: the relatively expensive operation of: \(A^{-1} T_i\) is precomputed outside the integration loop. The matrix \(A\) is defined in
SolveNewmark.optargs_i
If included, each optargs_i is a dictionary of arbitrary arguments for func_i.
Notes
The the j’th nonlinear force term is computed by:
N_j = (T_0 @ func_0(d, j, h, **optargs_0) + T_1 @ func_1(d, j, h, **optargs_1) + ...)
That term is used to compute the
j+1’th displacement. That is appropriate because of the nature of the central finite difference formulae used in the Newmark-Beta formation. For reference, here is the equation (copied fromSolveNewmark):\[A u_{n+2} = \frac{1}{3} \left ( F_{n+2} + F_{n+1} + F_{n} \right ) + N_{n+1} + A_1 u_{n+1} + A_0 u_{n}\]The solution namespace returned by
tsolve()will contain the outputs of each user defined function in the dictionary z.Note
Nastran estimates velocity by: \(v_j = (d_j - d_{j-1})/h\). In your function, you can use something like:
vj = (d[:, j] - d[:, j-1])/h. That will work even for the first call, when j is 0, because “-1” displacements are stored in the last column of d for just this purpose.Note
The nonlinear forces are computed in the integration loop for the non-residual flexibility equations only. Therefore, it is recommended to not use the rf option with nonlinear force terms.
Examples
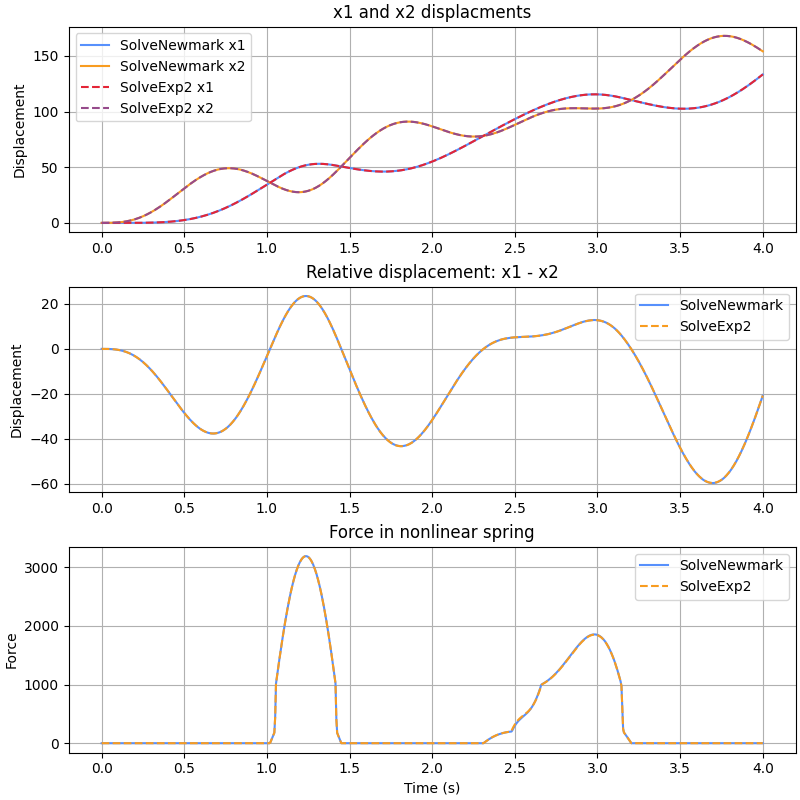
Model a two-mass system with one linear spring and one nonlinear spring. The nonlinear spring is only active when compressed. There is a gap of 0.01 units before the spring starts being compressed.
Model:
|--> x1 |--> x2 |----| 50 |----| | 10 |--\/\/\--| 12 | F(t) | | | | =====> |----| |-/\/-| |----| K_nonlinear F(t) = 5000 * np.cos(2 * np.pi * t + 270 / 180 * np.pi)
The nonlinear spring force is linearly interpolated according to the “lookup” table below. Linear extrapolation is used for displacements out of range of the table.
>>> import numpy as np >>> from scipy.interpolate import interp1d >>> import matplotlib.pyplot as plt >>> from pyyeti import ode >>> >>> # mass and stiffness: >>> m = np.diag([10., 12.]) >>> k = np.array([[50., -50.], ... [-50., 50.]]) >>> c = 0. * k # no damping >>> >>> # define time steps and force: >>> h = 0.005 >>> t = np.arange(0, 4 + h / 2, h) >>> f = np.zeros((2, t.size)) >>> f[1] = 5000 * np.cos(2 * np.pi * t + 3 / 2 * np.pi) >>> >>> # define interpolation table for force (the lookup >>> # value is x1 - x2): >>> lookup = np.array([[-10, 0.], ... [0.01, 0.], ... [5, 200.], ... [6, 1000.], ... [10, 1500.]]) >>> >>> # for transforming lookup value to forces on the >>> # masses: >>> Tfrc = np.array([[-1.], [1.]]) >>> >>> # turn interpolation table into a function for speed >>> interp_func = interp1d(*lookup.T, ... fill_value='extrapolate') >>> >>> # function needed for ode.SolveNewmark.def_nonlin: >>> def nonlin(d, j, h, interp_func): ... return interp_func(d[[0], j] - d[[1], j]) >>> >>> # Solve: >>> ts = ode.SolveNewmark(m, c, k, h) >>> ts.def_nonlin( ... {'kcomp': (nonlin, Tfrc, ... dict(interp_func=interp_func))}) >>> sol = ts.tsolve(f) >>> >>> # for comparison, run in SolveExp2 using the generator >>> # feature: >>> ts2 = ode.SolveExp2(m, c, k, h) >>> gen, d, v = ts2.generator(len(t), f[:, 0]) >>> >>> for i in range(1, len(t)): ... if i == 1: ... dx = d[0, i - 1] - d[1, i - 1] ... else: ... # for improved convergence, use linear ... # interpolation to estimate displacements at ... # current time: ... dx = (2 * d[0, i - 1] - d[0, i - 2] + ... d[1, i - 2] - 2 * d[1, i - 1]) ... f_nl = (Tfrc @ interp_func([dx])) ... gen.send((i, f[:, i] + f_nl)) >>> >>> sol2 = ts2.finalize() >>> >>> # plot results: >>> _ = plt.figure('Example', figsize=(8, 8), clear=True, ... layout='constrained') >>> >>> _ = plt.subplot(311) >>> _ = plt.plot(t, sol.d.T) >>> _ = plt.plot(t, d.T, '--') >>> _ = plt.title('x1 and x2 displacments') >>> _ = plt.ylabel('Displacement') >>> _ = plt.legend(('SolveNewmark x1', ... 'SolveNewmark x2', ... 'SolveExp2 x1', ... 'SolveExp2 x2')) >>> >>> _ = plt.subplot(312) >>> _ = plt.plot(t, sol.d[0] - sol.d[1], ... label='SolveNewmark') >>> _ = plt.plot(t, d[0] - d[1], '--', label='SolveExp2') >>> _ = plt.title('Relative displacement: x1 - x2') >>> _ = plt.ylabel('Displacement') >>> _ = plt.legend() >>> >>> _ = plt.subplot(313) >>> _ = plt.plot(t, sol.z['kcomp'][0], ... label='SolveNewmark') >>> _ = plt.plot(t, interp_func(d[0, :] - d[1, :]), '--', ... label='SolveExp2') >>> _ = plt.title('Force in nonlinear spring') >>> _ = plt.xlabel('Time (s)') >>> _ = plt.ylabel('Force') >>> _ = plt.legend()